Download
Apenas aqui, você encontra imagem de máquina virtual pronta para importação e uso do mhvtl (VirtualBox, Vmplayer etc.):
Configurações de Rede
Inicie a máquina virtual e faça login:
- Usuário: root
- Senha: mhvtl
Verifique o endereço IP adquirido pela sua máquina virtual do mhvtl. Exemplo:
ifconfig eth0
Ou configure um IP Estático definitivo para sua estação. Edite o arquivo /etc/network/interfaces, comente a linha “iface eth0 inet dhcp“, e acrescente as demais como no exemplo abaixo:
# iface eth0 inet dhcp iface eth0 inet static address 10.0.0.50 netmask 255.255.255.0 gatewau 10.0.0.1 dns-nameservers 8.8.8.8
Acrescente a seguinte linha ao arquivo “/etc/hosts“, subsituindo o IP pelo o do seu servidor mhvtl:
10.0.0.50 mhvtl.local.lan mhvtl
Também modifique o hostname para mhvtl (necessário para correta operação da do emulador). Reinice a máquina:
echo "mhvtl" > /etc/hostname reboot
Primeiro Acesso:
Conforme a Figura 1, acesse a interface web através do navegador de Internet A senha é mhvtl:
- http://ip_servidor/mhvtl
Figura 1: Tela de Login.
Como mostrado na Figura 2, existe um robô-de-fitas da fabricante HP já configurado. É possível removê-lo mais tarde caso deseje testar outras marcas, mas precisamos criar outro antes.
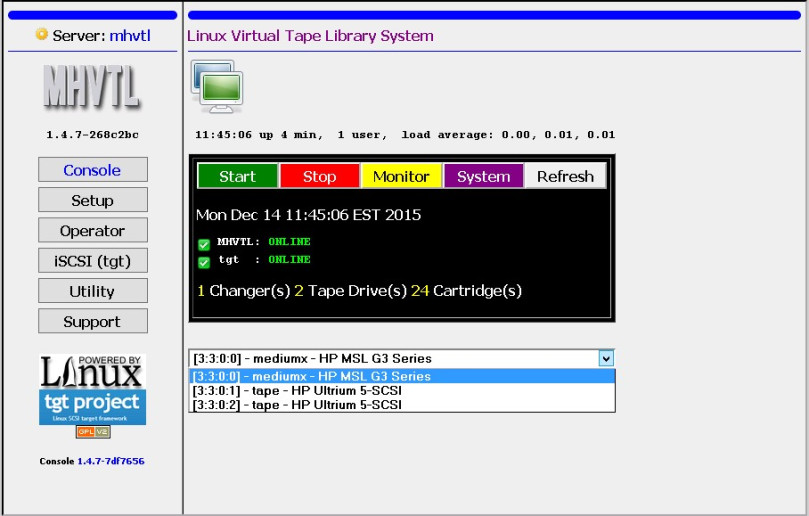
Figura 2: Robô já instalado por padrão.
A Figura 3 mostra a primeira tela após clicar no botão “Setup”, necessário para adicionar (Add) o novo equipamento.
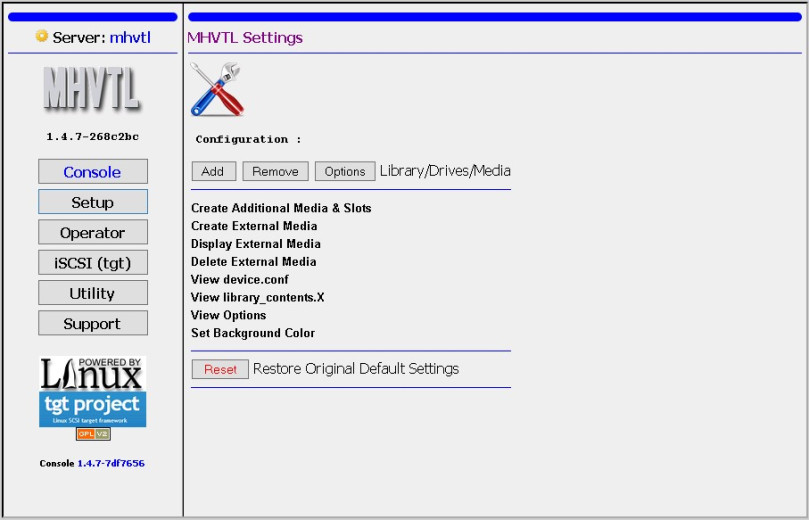
Figura 3: Início Setup novo robô.
Seguindo o wizard (Figura 4), o mesmo levará às telas de escolha do fabricante e tipo do equipamento.
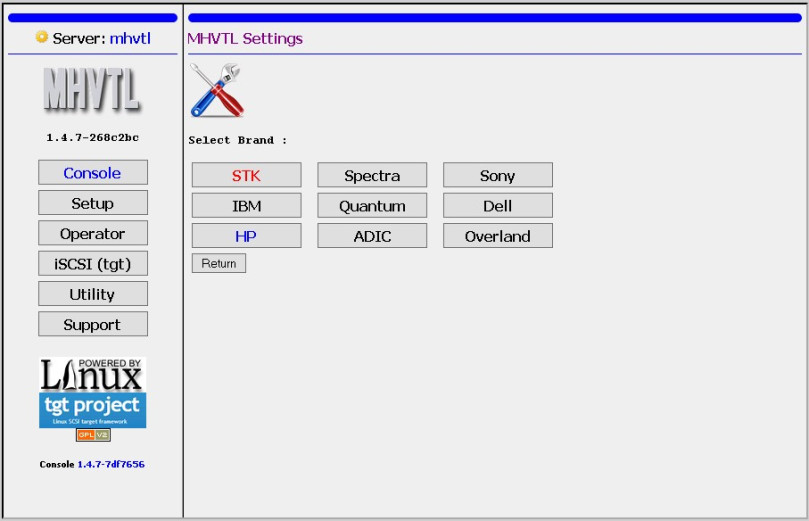
Figura 4: Tela de Seleção do Fabricante.
Siga o wizard até o reinício dos daemons para aplicar as alterações. Se desejado, volte ao Setup e remova o robô da HP original.
As figuras deste artigo foram copiadas de: https://univirt.wordpress.com/2015/12/15/using-mhvtl-to-simulate-a-tape-library-in-your-veeam-lab/
Mapeando o Robô de Fitas via iSCSI
A partir de seu servidor de backup Bacula, instale as ferramentas de inicialização iSCSI do Linux.
# Centos / RHEL yum -y install iscsi-initiator-utils # Debian / Ubuntu apt-get -y install open-iscsi
Teste o acesso ao serviço iSCSI mhvtl e obtenha o IQN do target, informando o seu IP como no exemplo abaixo:
iscsiadm -m discovery -t sendtargets -p 10.0.0.50
Execute o comando seguinte para fazer o login iSCSI e poder usar robô-de-fitas virtual. O targetname é o IQN obtido pelo discovery anterior:
iscsiadm -m node --targetname "iqn.2011-04.com.nia:mhvtl:mhvtl:stgt:1" --portal "10.0.0.50:3260" --login
Os comandos lsscsi -g e dmesg devem mostrar informações sobre os dispositivos adicionados.
Configurando o Robô-de-Fitas no Bacula
O Storage Daemon contém as configurações dos dispositivos de armazenamento (bacula-sd.conf). O Bacula chama robôs-de-fitas por um nome genérico (Autochanger = trocador automático de mídia). É necessário acrescentar um Autochanger, listando a quantidade e o nome de Drives de Fitas que serão também acrescentados através de recursos Device. O próprio bacula-sd.conf tem um exemplo (comentado) como o abaixo (ou através do Bweb, Coniguração do Bacula, Storage Daemon):
Autochanger {
Name = TL2000
Device = Drive-1
Device = Drive-2
Changer Command = "/etc/bacula/scripts/mtx-changer %c %o %S %a %d"
Changer Device = /dev/tape/by-id/caminho_braço_robô
}
Device {
Name = Drive-1 #
Drive Index = 0
Media Type = LTO
Archive Device = /dev/tape/by-id/caminho_drive_1-nst
AutomaticMount = yes; # when device opened, read it
AlwaysOpen = yes;
RemovableMedia = yes;
RandomAccess = no;
AutoChanger = yes
}
Device {
Name = Drive-2 #
Drive Index = 1
Media Type = LTO
Archive Device = /dev/tape/by-id/caminho_drive_2-nst
AutomaticMount = yes; # when device opened, read it
AlwaysOpen = yes;
RemovableMedia = yes;
RandomAccess = no;
AutoChanger = yes
}
Conforme este exemplo, o principal aqui é modificar os valores do ChangerDevice e ArquiveDevice, de acordo como apresentados para o sistema operacional Linux. O caminho a seguir mostra os caminhos estáticos (que não são modificados após reboot do servidor):
ls /dev/tape/by-id
Então, amarre o novo Autochanger do Bacula Storage Daemon ao Director. Edite o bacula-dir.conf e adicione um bloco parecido com o abaixo. Os valores de Device e MediaType devem necessariamente coincidir com os valores setados no bacula-sd.conf:
Storage {
Name = RoboFitas
Address = ip_servidor_bacula
SDPort = 9103
Password = "iDnQ0d2OJEgSlVltJlLZQwC9Yb9iA/j3cikw4cfDku8N"
Device = TL2000
Media Type = LTO
Maximum Concurrent Jobs = 10
}
Ainda no bacula-dir.conf, você pode associar uma nova Pool ao novo dispositivo RoboFitas. Assim, todo Job executado nessa Pool irá ser gravado neste novo dispositivo. Exemplo:
Pool {
Name = Fitas
Pool Type = Backup
Recycle = yes
AutoPrune = yes
Volume Retention = 365 days
Storage = RoboFitas
}
Salve e saia. Reinicie o Storage Daemon e Director para aplicar as alterações:
service bacula-sd restart service bacula-dir restart
Inicialize Volumes do Bacula nas fitas do robô (de acordo com seus códigos de barras virtuais!):
echo "label barcodes storage=RoboFitas pool=Fitas" | bconsole
Execute Jobs de backup através do bconsole para a nova Pool (ou através da interface gráfica favorita). Talvez seja necessário mudar o nome do Job de backup para um que esteja configurado em seu Bacula Director:
echo "run job=BackupClient1 Pool=Fitas yes" | bconsole
Acompanhe a execução do Job através do comando messages, dentro do bconsole. Exemplo:
echo "messages" | bconsole
Fim!



Este ambiente está sendo usado como um storage de hardware em fitas?
Olá. Sim, é um emulador de armazenamento em fitas – VTL. Na verdade ele grava em disco.