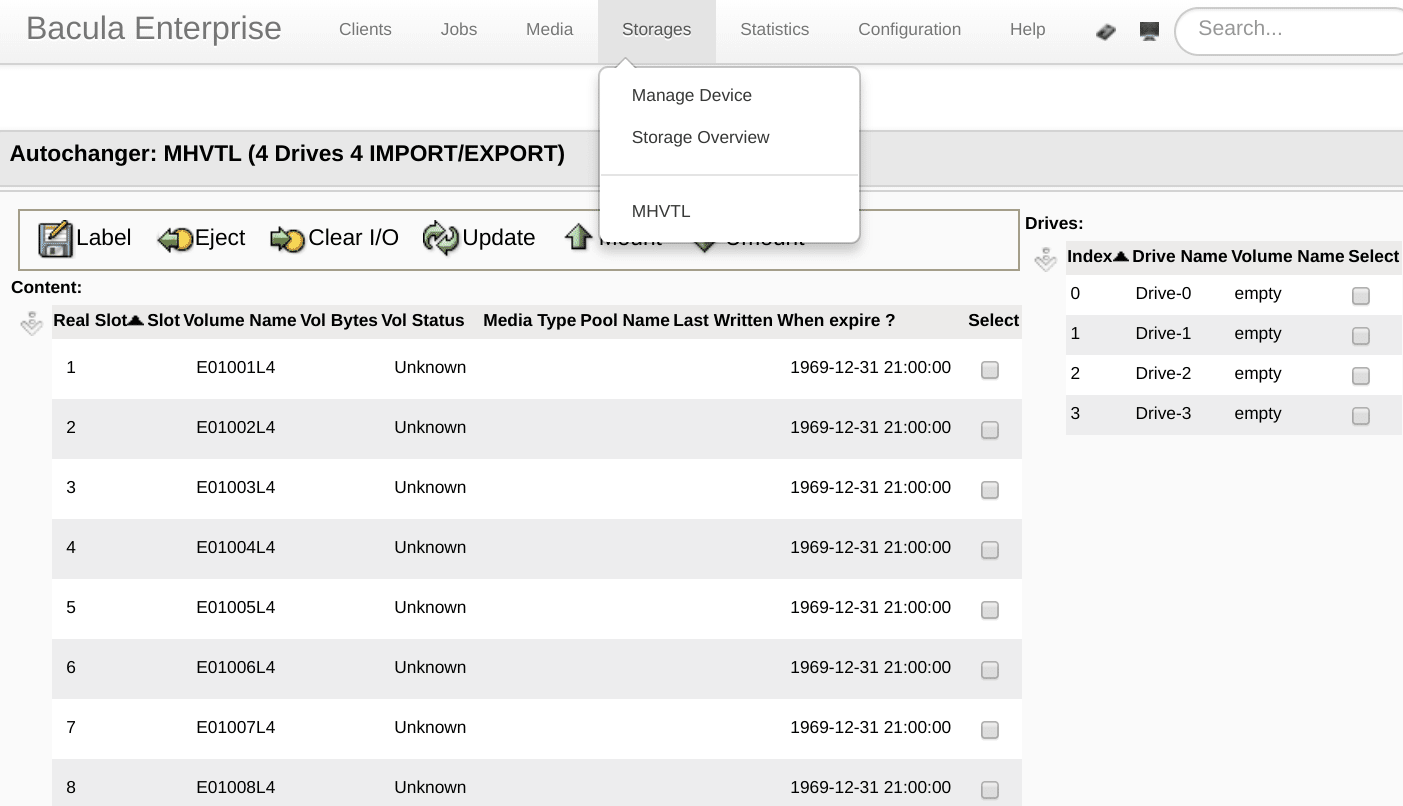
Como se muestra en la Figura 1, la configuración adicional del Bweb descrita en este documento permite una gestión 100% gráfica de las operaciones del robot-de-cintas, tales como:
- El etiquetado de cintas nuevas (etiqueta barcodes)
- El inventario de las cintas por el bacula (update slots)
- Otro
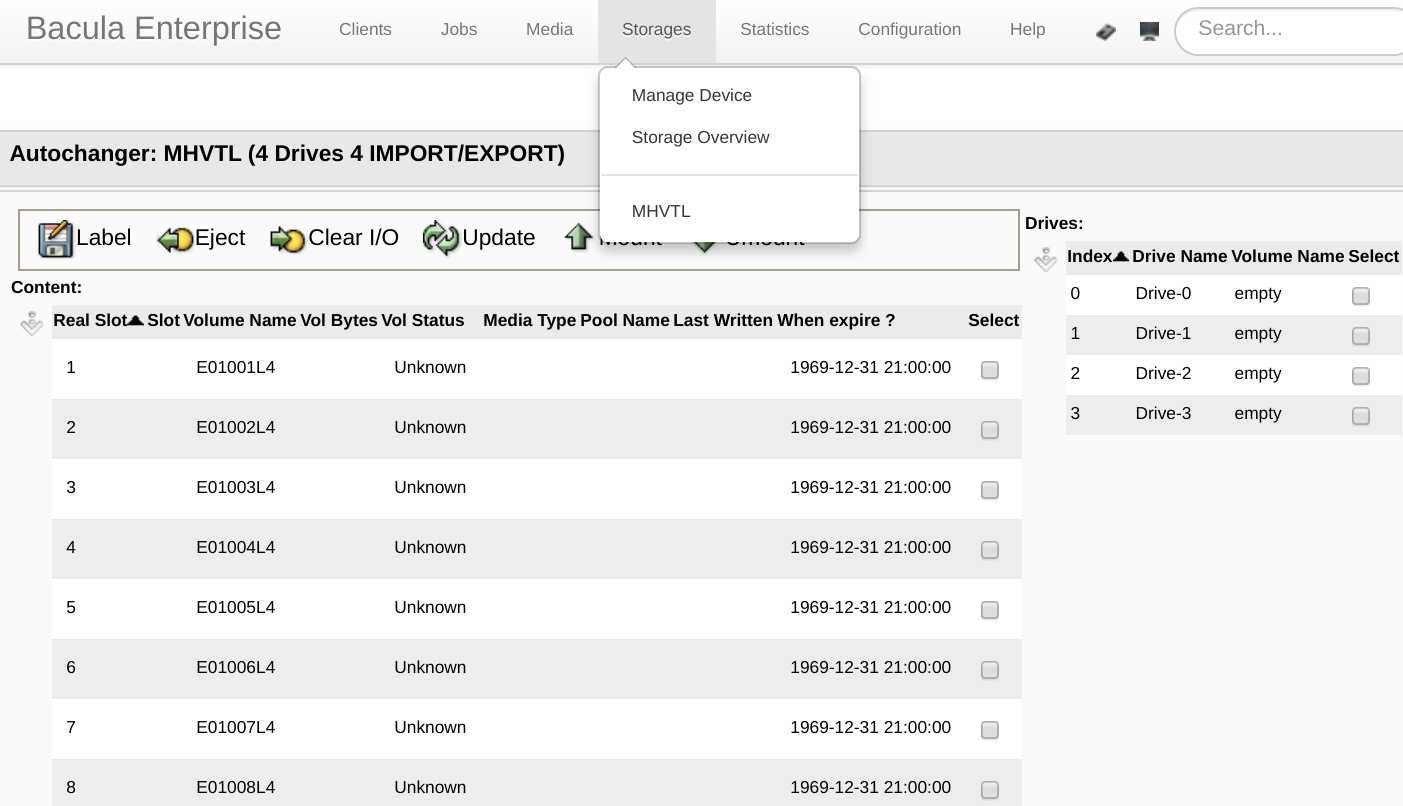
Figura 1. Operación Gráfica del Robot-de-cintas por el Bweb
Configuración del Bacula
Como se muestra en las Figuras 2 y 3, en el menú de Configuración del Bacula, además de la configuración del Storage del Robot-de-cintas apuntando a la configuración de “Autochanger” del Storage Daemon, es necesario atar también cada uno de los Drives de Cinta presentes en el ” incluso especificando el nombre de los Dispositivos y el tipo de medios.
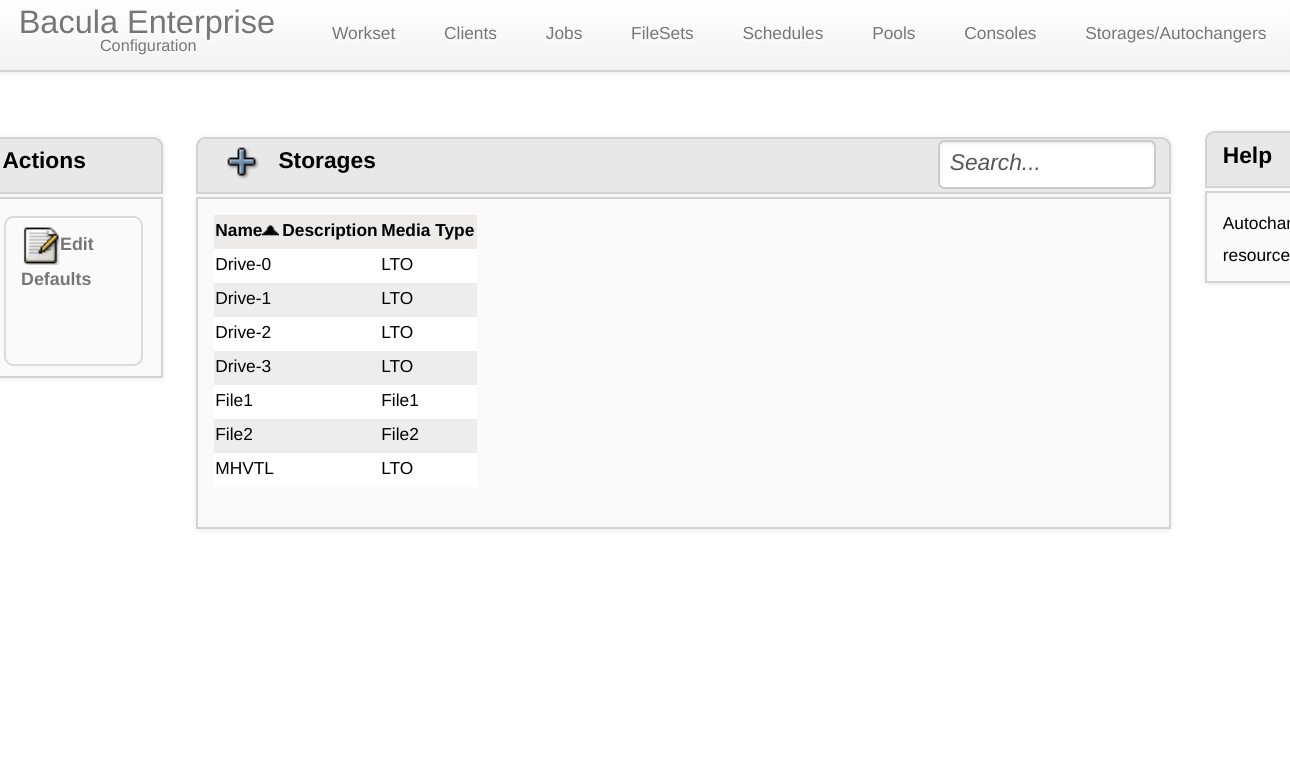
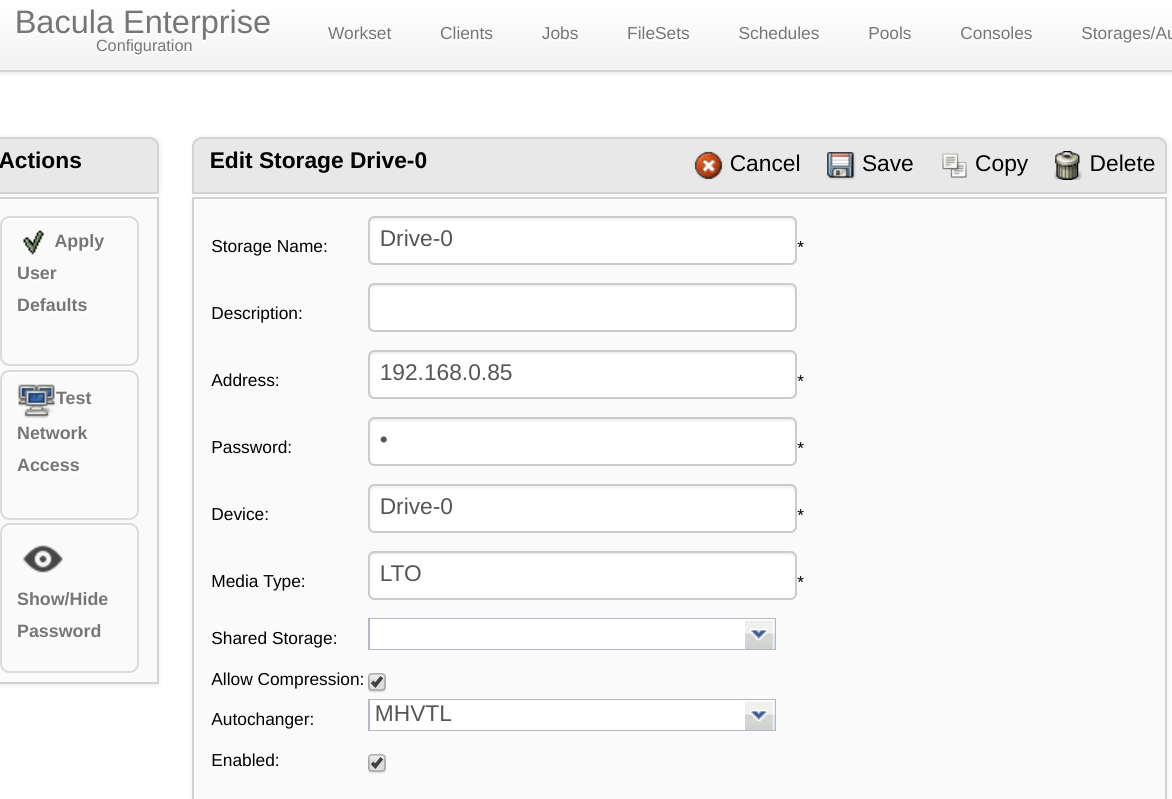
Figuras 2 y 3. Amarre de los Drives en la Configuración de Almacenamiento (Storages) del Director
Aplique los cambios en el menú Workset de la configuración del Bacula.
Configuración del Bweb
De acuerdo con la Figura 4, en el menú de configuración de Bweb, haga clic en el botón “Add Autochanger”.
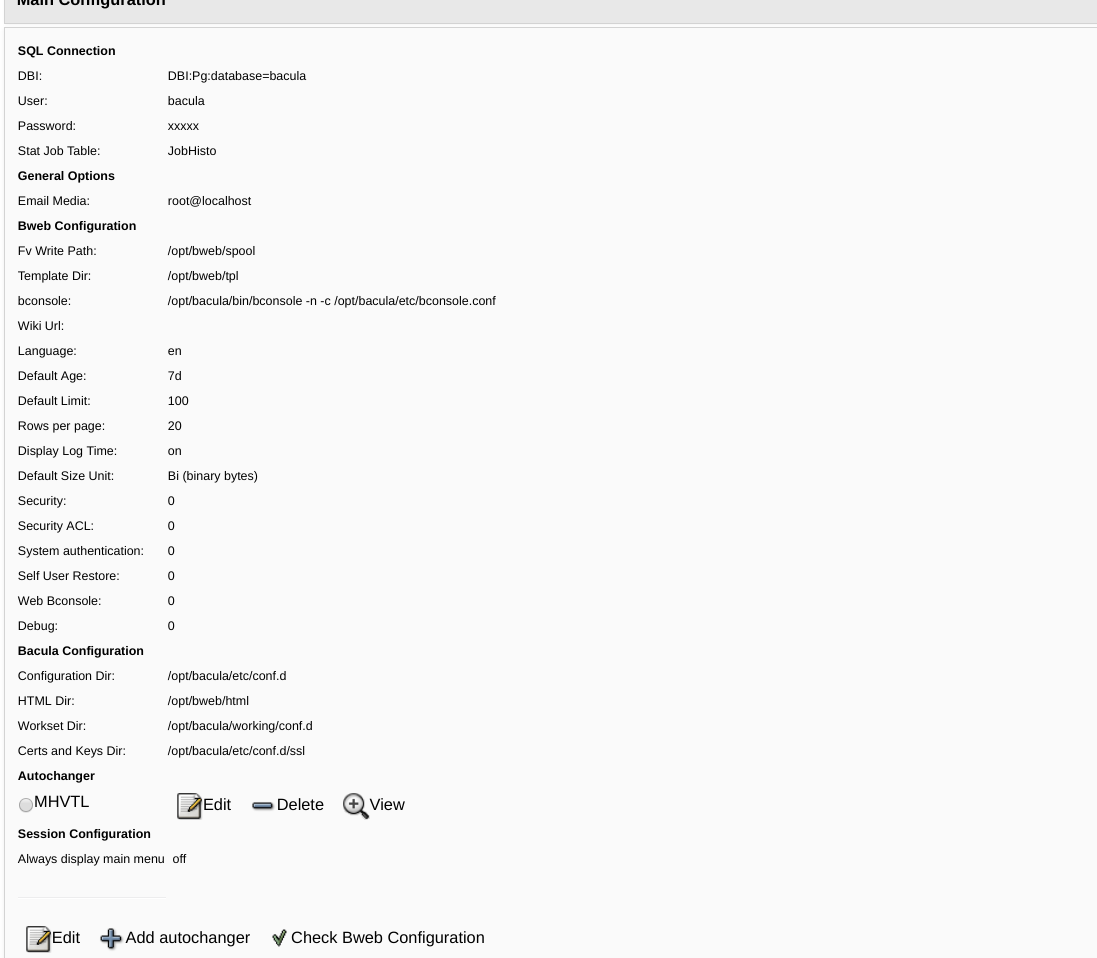
Figura 4. Menú de Configuración de Bweb, Botón de Añadir Autochanger Abajo de la pantalla
Como se muestra en la Figura 5, elija qué dispositivo es el robot de cintas, informe el camino estático al brazo del robot de cintas en el sistema operativo (por ejemplo /dev/tape/by-id/ scsi-xxxx) en el campo Device, marque los dispositivos (unidades) que pertenecen al robot e informe su Drive Index (similar al configurado en el Storage Daemon).

Figura 5. Agregar Autochanger en la configuración del Web
Listo! La Figura 6 muestra que si todo está correctamente configurado, ya es posible acceder a las opciones del robot por el menú de los balances de la pantalla inicial de Bweb.
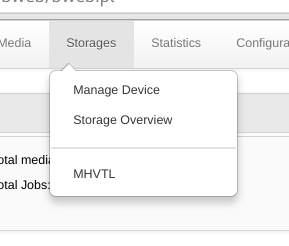
Figura 6. Robot-de-cintas MHVTL en el menú Storages de la pantalla inicial de administración de Bweb


